When it comes to navigation, precision really matters. The Inertial Nav System is a key player in making sure we get accurate positioning. Experts like Dr. John Harrison from Navigation Technologies Inc. often highlight that, “Having a good Inertial Nav System can seriously boost your real-time awareness of where you are.” Basically, it uses some pretty advanced sensors to track movement, giving us super precise info.
That said, it’s not all smooth sailing. Calibration mistakes can pile up over time and lead to big errors. Plus, environmental stuff—like magnetic interference—can mess with its performance. So, it’s important to keep these limitations in mind when you're choosing or working with an Inertial Nav System for different tasks.
Another thing that really counts is making sure users are well-trained and comfortable with the system. Understanding how it works, from aligning sensors to interpreting data, can really make a difference in navigation results. It’s not just about the tech; it’s about how well you get to know it. Every step you take in mastering the Inertial Nav System shows your dedication to improving navigation accuracy, which is pretty cool in its own right.

Overview of Inertial Navigation Systems and Their Components
Inertial Navigation Systems (INS) play a crucial role in today’s navigation technologies. These systems rely primarily on sensors to track the position and movement of a vehicle. They consist of accelerometers, gyroscopes, and sometimes magnetometers. Each of these components serves a specific purpose.
Accelerometers measure linear acceleration, while gyroscopes monitor rotational movement. Together, they provide accurate positioning data.
Using Inertial Nav can present challenges. The data can drift over time, causing errors in navigation. At intervals, recalibration might be necessary. This recalibration can often depend on external references, like GPS signals. However, in environments where GPS is unavailable, relying solely on Inertial Nav can be problematic.
Understanding the limitations is essential. The sensors need regular maintenance for accuracy. Noise in the measurements can distort the final output. Learning to interpret these errors is vital for effective navigation. It’s a continuous process of improvement and adjustment.
Principles of Operation: How Inertial Navigation Systems Work
Inertial Navigation Systems (INS) are fascinating technologies. They rely on a series of sensors to track motion. The core components include accelerometers and gyroscopes. These elements together form the Inertial System Unit. The accelerometers measure changes in speed and position. Gyroscopes help determine orientation and angular velocity.
As an aircraft or ship moves, the INS collects data continuously. This data helps compute the vehicle's current position. However, this system has its limitations. Errors accumulate over time, leading to drift. Regular updates from external references can mitigate these issues. Relying solely on an INS can be risky without periodic checks.
Interestingly, many users underestimate the need for calibration. Calibration ensures accuracy and maintains reliability. It's not just a plug-and-play technology. A thorough understanding of the environment is essential. As we explore advanced navigation methods, the inertial system remains a critical tool. It’s crucial to appreciate its strengths and weaknesses to utilize it effectively.
Types of Sensors Used in Inertial Navigation Systems
Inertial Navigation Systems rely on various sensors to navigate accurately. The most common types include accelerometers and gyroscopes. Accelerometers measure linear acceleration. They detect changes in speed and direction. On the other hand, gyroscopes monitor angular velocity. They help maintain orientation. Both sensors work together in an Inertial Sensor System to provide real-time data.
Tips for using these sensors effectively: Ensure regular calibration. Inaccurate readings can lead to navigation errors. Monitor sensor performance regularly. Drift can accumulate over time, affecting accuracy. If the readings seem off, check for potential interference or mechanical issues.
Integrating environmental sensors can enhance system performance. For instance, temperature and pressure sensors can compensate for fluctuations. This adds layers of information to your Inertial Sensor System. Remember to validate your navigation data frequently. Inertial navigation can sometimes provide misleading results, especially in complex environments. Always stay aware of these limitations as you navigate.
Inertial Navigation Systems: Types of Sensors and Their Accuracy
Integrating Inertial Navigation with Other Navigation Methods
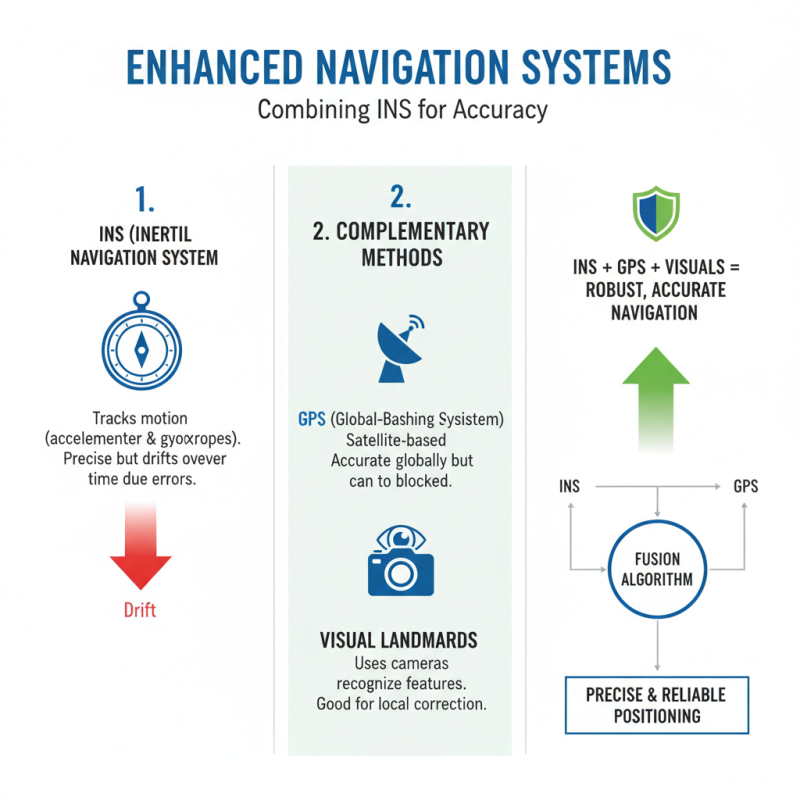
Inertial navigation systems (INS) offer precise positioning by tracking motion. However, they can drift over time due to errors in measurement. To enhance accuracy, integrating INS with other navigation methods is essential. GPS and visual landmarks can complement INS. Together, they provide a robust solution for navigation challenges.
GPS gives real-time location data. It corrects the drift of inertial systems effectively. On the other hand, using visual input from cameras can identify features and help adjust the inertial readings. These methods can help correct any inconsistencies in real-time. This combination also requires careful calibration to ensure the systems work seamlessly together.
The integration process can be complex. Collecting data from multiple sources presents challenges. Synchronization is critical. If not properly aligned, data can lead to mistakes in navigation. Regular adjustments are necessary to maintain accuracy. Balancing these techniques can produce a reliable navigation system that minimizes errors and maximizes efficiency. This reflective practice may surface overlooked aspects and reveal potential areas for improvement.
Calibration Techniques for Enhancing Accuracy in Inertial Navigation
Calibration techniques play a vital role in enhancing the accuracy of inertial navigation systems. At the core, these systems rely on precise measurements of acceleration and rotation. If the sensors are not calibrated correctly, even small errors can accumulate, leading to significant deviations over time. Regular recalibration is essential.
One effective technique is the use of reference signals. By comparing inertial measurements against known reference points, errors can be identified and corrected. This approach helps in addressing biases in sensor outputs. Additionally, environmental factors like temperature changes can affect sensor performance. Monitoring these factors while calibrating can lead to substantial improvements in accuracy.
Another method involves the use of algorithms that integrate data from multiple sensors. This technique can enhance overall navigation accuracy. However, integrating data may introduce complexity. The challenge lies in ensuring that the algorithms appropriately filter out noise while being sensitive to real changes. This balance requires careful tuning and thoughtful reflection on potential pitfalls. Regular testing and adjustment can help mitigate these risks and improve reliability.
How to Use Inertial Nav System for Accurate Navigation? - Calibration Techniques for Enhancing Accuracy in Inertial Navigation
| Calibration Technique |
Description |
Accuracy Improvement (%) |
Recommended Frequency |
| Static Calibration |
Involves calibrating the IMU while stationary to correct biases. |
10-15% |
Monthly |
| Dynamic Calibration |
Calibrating during known motion to adjust for gyroscope and accelerometer errors. |
20-30% |
Weekly |
| Temperature Compensation |
Adjusting readings based on temperature variations. |
5-10% |
Daily |
| Sensor Fusion |
Integrates data from multiple sensors to enhance accuracy. |
15-25% |
Continuously |
| Software Updates |
Updating firmware and calibration algorithms for improved performance. |
Variable |
As available |
Challenges and Limitations of Inertial Navigation Systems
Inertial navigation systems (INS) play a vital role in various fields, including aviation and maritime navigation. However, they face significant challenges. A primary limitation is drift. Over time, small errors in measurements accumulate, leading to substantial positioning errors. Research indicates that without external corrections, INS can deviate by several kilometers after a few hours of use.
Another major hurdle is the sensitivity to initial conditions. A slight inaccuracy when starting can result in extensive navigational errors. According to a study by the Institute for Navigation, positioning accuracy can decline to over 100 meters after prolonged operation. This factor complicates reliance on Inertial Guidance System in critical missions where precision is paramount.
**Tips:** Regularly calibrate your INS to minimize drift. Use complementary systems for corrections, such as GPS or visual-based navigation. Ensure that your starting conditions are meticulously verified to prevent significant errors later on. Even a small oversight can have vast implications.
Environmental factors also affect INS performance. Changes in temperature and altitude can impact sensor readings. In conditions like turbulence, data from gyroscopes and accelerometers may become less reliable. This susceptibility makes it crucial to continually assess the system's accuracy under varying conditions. Relying solely on an Inertial Guidance System without periodic adjustments can lead to misunderstandings in navigation accuracy.
Future Trends in Inertial Navigation Technologies and Applications
Inertial navigation technologies are evolving rapidly. Emerging trends point to smaller, more efficient systems. These advancements open new avenues in various applications, from autonomous vehicles to drones. Compact sensors can now fit into unconventional designs, enhancing user experiences.
One notable trend is the integration of AI with inertial navigation. This combination improves accuracy and adaptability. Systems can learn from environmental changes. However, the challenge lies in ensuring reliability in complex situations. Testing these systems in diverse conditions is a must. As we progress, we may often overlook potential shortcomings. Reflection on these aspects is crucial.
Another exciting development is the rise of MEMS technology. Micro-electromechanical systems are making navigation more accessible. They are cheaper and power-efficient, often yielding satisfactory precision. Yet, their susceptibility to noise raises questions. Balancing affordability with accuracy is vital for future applications. Continued innovation requires addressing these imperfections in design.
FAQS
: The service connects users with various options tailored to their needs.
You can easily sign up online by providing essential information like your email.
Basic usage is often free; however, premium features may have fees.
Data protection is prioritized, but sharing information always carries some risk.
You can reach out to support for help, but response times may vary.
Yes, cancellations are allowed, but some conditions may apply.
Typically, users must be at least 18 years old to register.
There is a range of options, including personalized recommendations based on preferences.
Updates occur regularly to enhance functionality and user experience.
Feedback is encouraged, but not all suggestions may be implemented.
Conclusion
Inertial Nav Systems are critical tools for accurate navigation across various applications, utilizing a combination of specialized sensors and sophisticated algorithms to determine position, orientation, and velocity. The fundamental operation relies on principles of inertial measurement, whereby the system processes data from accelerometers and gyroscopes to track motion without external references. Effective integration with other navigation methods can enhance overall accuracy, while regular calibration techniques are essential to minimize errors and maintain performance.
Despite their advantages, Inertial Nav Systems face challenges, including drift over time and susceptibility to environmental factors. As technology advances, future trends indicate a shift towards improved sensor capabilities and integration with satellite-based navigation systems. This evolution promises to expand the applications of inertial navigation, making it an ever more reliable choice for precise navigation in a changing technological landscape.
 TBSD60
TBSD60 BSD120
BSD120 BSD98
BSD98 BSD70
BSD70 BSD60
BSD60 BSD50
BSD50 BSD217
BSD217 INS1700
INS1700 INS970
INS970 INS570
INS570 INS170
INS170 SLA-4B1L1-65
SLA-4B1L1-65 SLA-4B1L1-130
SLA-4B1L1-130 SLA-8B1L1-165
SLA-8B1L1-165 DIVER 101
DIVER 101 DIVER 102
DIVER 102 DIVER 103
DIVER 103 DIVER 104
DIVER 104 DIVER 105
DIVER 105 DIVER 106
DIVER 106 SLLR3000
SLLR3000 SLLR905
SLLR905 SLLD25
SLLD25 160M
160M 170M
170M SLFC-70
SLFC-70 SLAF280
SLAF280 MR360
MR360